 火星网校
火星网校
2023广州车展开幕 如祺出行自动驾驶解决方案首次公开亮相
发布时间:2023-11-21 10:58:52 浏览量:120次
正在加速推动自动驾驶商业化落地
11月17日,第二十一届广州国际汽车展览会(下称“广州车展”)拉开帷幕,如祺出行完全自主研发的自动驾驶解决方案在本届广州车展公开亮相。作为国内行业领先的出行科技与服务公司,如祺出行以数据为核心驱动,打造自动驾驶技术闭环迭代平台,面向汽车制造商、自动驾驶解决方案供应商和传感器厂商,推出了由数据标注平台ONTIME Data Encoder、高精地图工具链ONTIME MapNet、智驾仿真平台ONTIME NexSim三大板块构成的自动驾驶解决方案,以行业领先的自动驾驶引擎加速自动驾驶商业化。

如祺出行自动驾驶解决方案在2023广州车展公开亮相
这是如祺出行首次公开展示其完整的自动驾驶解决方案,也标志着继2022年于全球率先实现有人驾驶网约车服务与Robotaxi商业化混合运营之后,如祺出行在科技转型战略上实现又一重大里程碑。

如祺出行以数据为核心驱动打造自动驾驶技术闭环迭代平台
加速自动驾驶商业化
一站式智能化数据标注平台 效率提升最高超过500%
在自动驾驶领域,数据标注能够提高车辆对交通环境识别的准确性、优化自动驾驶算法和决策的可靠性,从而保障车辆行驶的安全和优良体验。传统数据标注工艺普遍存在的速度慢、准确率低、人工成本高,以及融合标注能力较弱等问题,成为自动驾驶实现商业化落地需要解决的难题。
如祺出行打造的一站式标注平台ONTIME Data Encoder,内置感知大模型,集标注工具、预标注模型、项目管理为一体,支持自动驾驶等场景下2D、3D、4D全类别标注,拥有如BEV 4D标注、叠帧时序标法、AI预标注、关键帧插值、2D/3D融合标注及自动贴合等先进的标注工艺,智能化提升数据标注效率。

如祺BEV 4D标注工具通过融合时间维度
能为数据分析和模型训练提供更丰富、准确的数据
在4D标注工艺上,如祺BEV 4D标注工具通过融合时间维度,能为数据分析和模型训练提供更丰富、准确的数据,相比传统3D标注,效率提升500%以上;而4D标注-叠帧时序标法则可针对点云中静止车辆进行叠帧共享标注,大幅减少标注工作量,标注效率提升也超过300%。
在3D标注工艺上,ONTIME Data Encoder内置的如祺自研AI预标注模型,通过千万帧学习素材,并结合自研模型算法,能快速识别实体对象,实现全帧自动标注和自定义区间标注两种模式的预标注,从而缩短模型迭代周期。据实际测算,如祺AI预标注功能可帮助企业降低90%的成本,整体标注效率提升超过300%。
此外,如祺在3D标注工艺上还拥有关键帧插值和融合标注两大亮点:在标注完一段点云数据首帧、末帧后,可自动完成对其他帧的标注;点云中的标注内容,能够自动映射到2D图片视角,并拥有自动贴合能力,在俯视状态下可自动贴合车辆。
高精地图能力+轻地图路线 有图无图都能自动驾驶
随着高阶辅助智能驾驶的爆发式发展,高精地图的覆盖度、更新频率、成本等问题成为行业争论的焦点,也分化出有图和无图的技术路线。
如祺众源地图解决方案
以更低成本,更高的更新频率提升高精地图鲜度
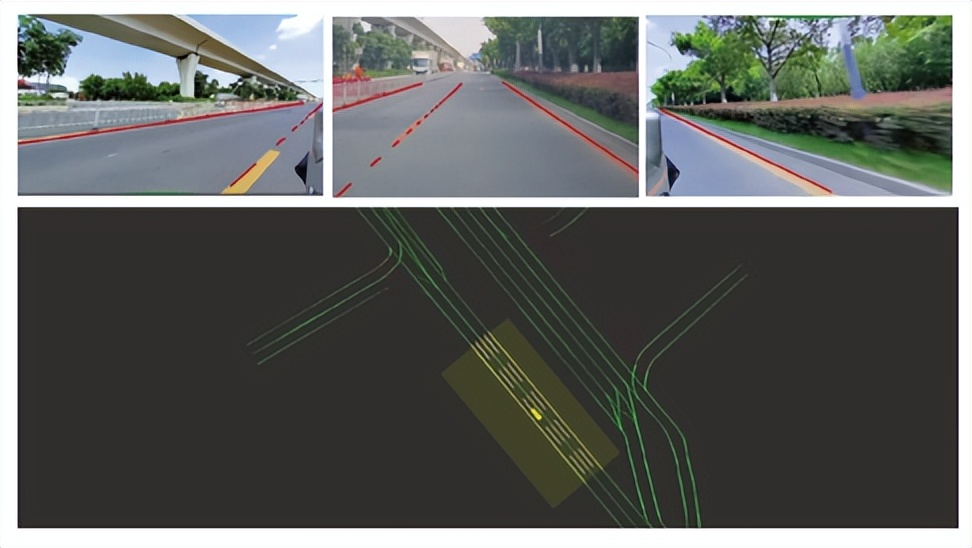
如祺出行自研的全栈高精地图工具链ONTIME MapNet,包含地图采集、预处理、地图生产、母库地图质检、地图编译、编译后地图质检平台以及地图引擎整套能力,并针对高精地图鲜度和无图场景等问题,推出了轻地图NOP方案,实现有图和无图场景下都能实现自动驾驶。
自动驾驶技术的大规模商业化落地,对车辆智驾系统提出了更强的泛化能力要求。如祺基于大模型,构建了BEV在线建图能力,车辆实时生成“活地图”,补足自动驾驶决策算法所需的道路拓扑信息,从而形成如祺轻地图NOP方案和众源地图方案。
一方面,如祺轻地图NOP方案基于“BEV+Transformer”架构,实现多摄像头、多传感器的信息融合,利用Transformer大模型的多模态优势,用更低的算力实现在车端实时构建轻地图,实现复杂场景或无图场景下的自动驾驶,从而不依赖高精地图,使得自动驾驶感知算法泛化性大幅提升。
另一方面,基于出行场景的众源地图方案,充分发挥如祺出行平台的场景和数据优势,实时车端建图,以更低成本、更高的更新频率,提升如祺高精地图鲜度,为客户提供更优质的地图服务。
在高精地图的绘制中,道路路口因为要素信息较多、无真实引导标识、要素间相互重叠压盖等原因,往往需要投入更多精力绘制。如祺高精地图生产平台,拥有一系列自动化的制图工具,如路口车道线自动生成、自动推导车道线等,实现自动化车道线绘制,能够有效降低高精地图的生产成本,提升数据鲜度。
多形态仿真场景功能 赋能OEM低成本、零风险验证技术可靠性
仿真场景是智驾车辆从技术研发、迭代到规模量产各个环节都必不可少的能力。
如祺智驾仿真平台提供集方案预研、研发迭代、批量测试、
量产装配等功能为一体的一站式智驾仿真解决方案
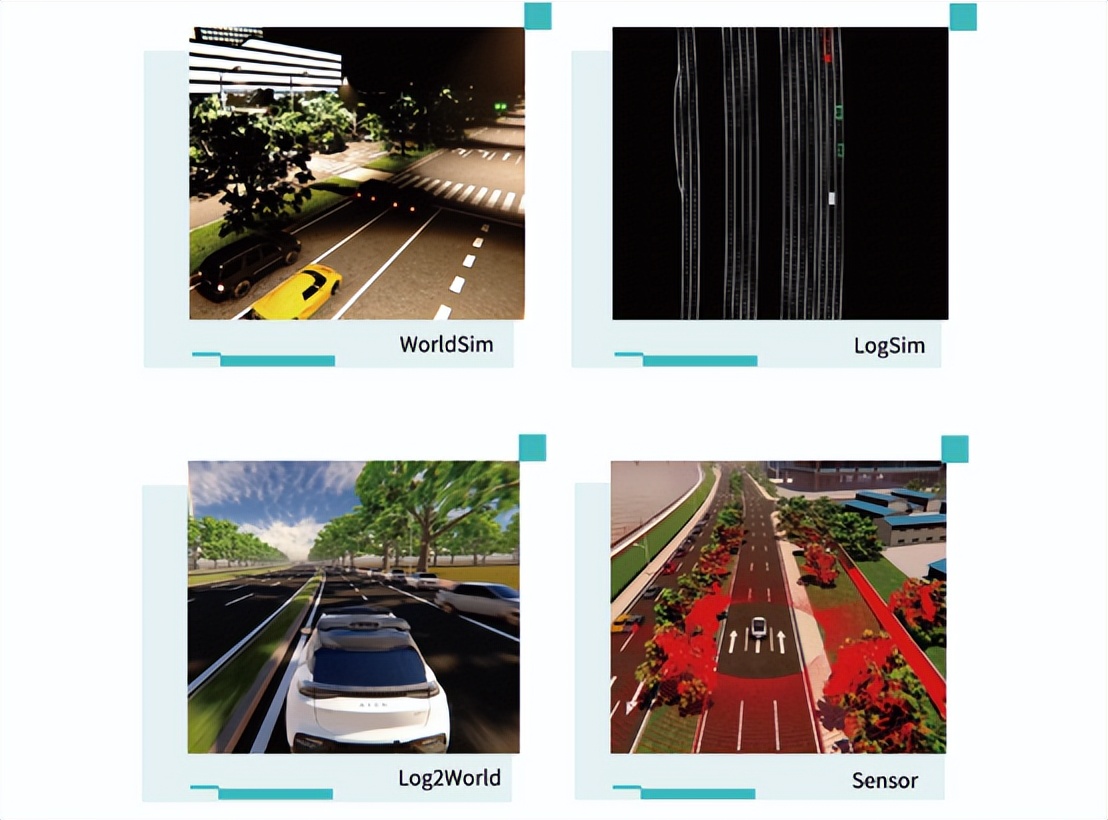
如祺自研的下一代智驾仿真平台ONTIME NexSim,面向L3和L4研发需求,为主机厂、Tier-1及科研院所等客户提供集方案预研、研发迭代、批量测试、量产装配为一体的一站式智驾仿真解决方案。该平台同时具备LogSim、WorldSim及Log2World等多形态仿真场景功能,能够利用先进的实时车辆动力学、人体动力学仿真、传感器仿真及六轴云台等技术,满足用户多元化需求,实现降低研发成本和提升智驾产品的安全性、时效性及乘员舒适性等目标。
ONTIME NexSim的LogSim功能,具有行车数据滤波、焦点数据段提取、场景库自动生成与归类等功能模块,可实现通用场景及Corner Case的自动挖掘,还支持用户通过设置可编程的筛选规则,从海量的行车数据中挖掘出有效场景,形成专属的自动驾驶场景库。
由于已知场景库与测试场地未必能覆盖智驾车辆上路行驶可能遇到的所有场景,ONTIME NexSim通过WorldSim实现场景自演进,可批量地构造各类极端的场景,从而验证车辆在场景下的运行情况,赋能主机厂及Tier-1供应商在零成本、零风险的虚拟环境中进行自动化无人值守仿真,快速积累测试里程。
基于物理的传感器仿真方法,ONTIME NexSim可输出与当前市面上主流传感器分布一致的传感器数据及真值,帮助用户实现训练数据集生成、引导训练、算法检测,并补充危险、极端场景的传感器数据。同时,ONTIME NexSim还支持通过高精度地图生成虚拟仿真世界,从而实现对真实世界的数字孪生,包括模拟各种光照及极端天气,也支持由导航信息启发式过程建模,自动化构建地形、高速公路、城市快速路、城市道路等常见路段及周边建筑,并过程化生成与之匹配的高精度地图。

如祺出行在2022年于全球率先实现
有人驾驶网约车服务与Robotaxi商业化混合运营
如祺出行深耕出行科技,致力于搭建全方位、立体化的出行科技解决方案及服务体系。近年来,凭借平台对智慧出行的敏锐洞察,如祺出行充分发挥平台拥有的丰富场景及海量数据等优势,不断加码布局自动驾驶,面向国内智能汽车产业链推出可商业化的解决方案。目前,该方案已为国内多家自动驾驶技术公司、头部汽车主机厂和智能汽车解决方案供应商提供服务,正在加速推动自动驾驶商业化落地。




热门课程推荐

热门资讯
-
想将照片变成漫画效果?这篇文章分享了4个方法,包括Photoshop、聪明灵犀、VanceAI Toongineer、醒图,简单操作就能实现,快来尝试一下吧!
-
2. AI视频制作神器Viggle:让静态人物动起来,创意无限!
Viggle AI是一款免费制作视频的AI工具,能让静态人物图片动起来,快来了解Viggle AI的功能和优势吧!
-
3. 华为手机神奇“AI修图”功能,一键消除衣服!原图变身大V领深V!
最近华为手机Pura70推出的“AI修图”功能引发热议,通过简单操作可以让照片中的人物换装。想了解更多这款神奇功能的使用方法吗?点击查看!
-
4. AI显卡绘画排行榜:4090无悬念,最具性价比出人意料
在AI绘图领域,Stable Diffusion的显卡绘图性能备受关注。本文整理了Stable Diffusion显卡的硬件要求和性能表现,以及2023年3月显卡AI绘图效率排行榜和性价比排行榜。欢迎查看最新的AI显卡算力排行榜。
-
近年来,人工智能逐渐走入公众视野,其中的AI图像生成技术尤为引人注目。只需在特定软件中输入关键词描述语以及上传参考图就能智能高效生成符合要求的...
-
就能快速生成一幅极具艺术效果的作品,让现实中不懂绘画的人也能参与其中创作!真的超赞哒~趣趣分享几款超厉害的AI绘画软件,提供详细操作!有需要的快来...
-
7. 零基础10分钟生成漫画,教大家如何用AI生成自己的漫画
接下来,我将亲自引导你,使用AI工具,创作一本既有趣又能带来盈利的漫画。我们将一起探索如何利用这个工具,发挥你的创意,制作出令人惊叹的漫画作品。让...
-
8. 10个建筑AI工具,从设计到施工全覆盖!肯定有你从来没听过的
讲述了建筑业比较著名的AI公司小库科技做出的探索,在这儿就不多说了。今天,我们试着在规划设计、建筑方案设计、住宅设计、管道设计、出渲染图、3D扫...
-
AI技术的快速发展为各行各业带来了许多创新应用,其中之一就是AI小说生成视频。这种技术利用人工智能算法和语言模型,将文本转化为视频剧情,加上配图、...
-
以下是一些免费的AI视频制作网站或工具,帮助您制作各种类型的视频。 1. Lumen5:Lumen5是一个基于AI的视频制作工具,可将文本转换为视频。 用户可以使...
最新文章
